


產(chǎn)品分類
更多相關產(chǎn)品
- LGZN-SZ02L型智能制造數(shù)字孿生虛擬仿真實訓室
- LGGY-DS23型大田耕種機器人實訓裝置
- LGGY-DS22型物理除草機器人實訓裝置
- LGGY-DS21型大田作業(yè)機器人實訓裝置
- LGGY-DS20型果園噴霧機器人實訓裝置
- LGGY-DS19型果園采摘機器人實訓裝置
- LGGY-DS18型果園應用開發(fā)通用平臺實訓裝置
- LGGY-DS17型智能割草機器人實訓裝置
- LGGY-DS16型雙臂復合機器人實訓裝置
- LGGY-DS15型七自由度機械臂實訓裝置
- LGGY-DS14型六自由度機械臂套件實訓裝置
- LGGY-DS13型具身復合機器人創(chuàng)新設計套裝實訓裝置(增強版)
- LGGY-DS12型便攜式ROS導航機器人學習平臺實訓裝置
- LGGY-DS11型基于大模型的智慧零售平臺實訓裝置
- LGGY-DS10型農(nóng)業(yè)智能車實訓裝置
- LGGY-DS09型智能服務機器人實訓裝置
- LGGY-DS08型ROS基礎教學智能車實訓裝置
- LGGY-DS07型視覺語音智能車實訓裝置
- LGGY-DS06型人形機器人實訓裝置
- LGGY-DS05型6足18自由度圓形仿生機器人實訓裝置
- LGGY-DS04型無人駕駛深度學習智能車實訓裝置
- LGGY-DS03型商服機器人-機械臂版及場地實訓裝置
- LGGY-DS02型計算機視覺平臺實訓裝置
- LGGY-DS01型智能汽車及賽道實訓裝置
- LGGY-Z08型智能制造綜合產(chǎn)線
- LGGY-SJ03型機器人視覺分揀螺母工作站實訓系統(tǒng)
- LGGY-WH05型工業(yè)機器人維護維修基礎教學工作站
- LGGY-F6A型服務機器人應用技術實訓平臺
- LGGY-K50型工業(yè)機器人應用工作站
- LGGY-R04型工業(yè)機器人一體化實訓平臺
- LGGY-R02B型智能生產(chǎn)線運行與維護綜合實訓裝置
- LGGY-T03A型智能制造單元系統(tǒng)集成應用平臺
- LGGY-W01A型工業(yè)機器人應用工作站
- LGGY-S2型工業(yè)機器人與智能視覺系統(tǒng)應用實驗平臺
- LG-MPS02型模塊化柔性自動化生產(chǎn)線實訓系統(tǒng)(八站)
- LGJ-IMS03型工業(yè)機器人模塊化智能生產(chǎn)線實訓系統(tǒng)
- LGJ-KY02型智能機器人智能制造綜合實操工作站
- LGJ-QBJ01型工業(yè)機器人模擬汽車領金沖壓集成制造實訓系統(tǒng)
- LGJ-CNC02型工業(yè)機器人智能生產(chǎn)流水線實訓平臺
- LGJ-ZH03型工業(yè)機器人組合式應用實訓裝置
LGGY-DS19型果園采摘機器人實訓裝置
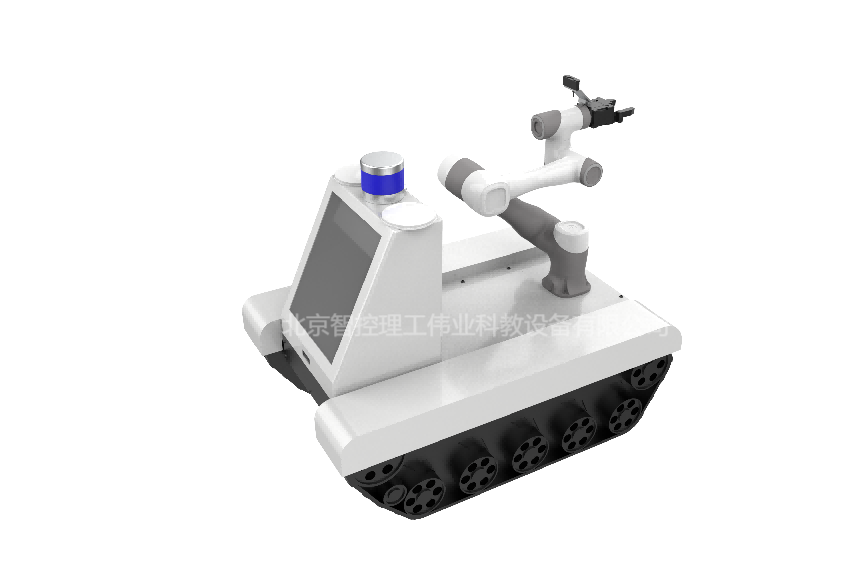
1、履帶運動底盤:1.1. 懸掛系統(tǒng): 克里斯蒂懸掛;1.2. 額定功率: ≥800W*2;1.3. 額定扭矩: ≥80NM;1.4. 運行速度: ≥1.5m/s;1.5. 最大越障: ≥150mm;1.6. 最大爬坡: ≥30度;1.7. 減震: 左右獨立*10避震器;1.8. 續(xù)航能力: 2h;1.9. 載重: ≥60kg;1.10. 電池; 鋰電池,48V;
2、控制器以及電源管理:控制器:CPU:i7;內存:8G;硬盤:120G固態(tài)硬盤;;電源管理:▲可編程控制每路電源通斷,過流保護,短路保護,5V 5A電源≥10路,12V 20A電源≥10路,24V 20A 電源≥10路,48V 80A 電源 ≥5路;
3 、手臂執(zhí)行系統(tǒng):
硬件組成:手臂輔助定位相機*1;6自由度機械臂*1;柔性手抓*1;
3.1手臂輔助定位相機:彩色圖像分辨率:1280x720,幀率:≥30fps;深度圖像分辨率:640x480,幀率:≥7fps;測量范圍:≥6米
3.2 6自由度機械臂:有效負載: ≥3kg;有效工作范圍: 100mm~600mm;自由度:重復定位精度:≤±0.2mm;最大末端速度:≥1m/s;整機重量(含控制器):≤150kg;
3.3 柔性手抓:指數(shù):3指;指長:≥58mm;最大半徑:≥208.5mm;產(chǎn)品重量:≤691g;加持力:≥2500g;
3.4有源控制器:供電電壓:24V;通訊方式:串口、IO;尺寸規(guī)格:≤220*206*80mm;輸出氣壓:-70-100kPa;
4、定位導航系統(tǒng):
硬件組成:差分GPS組合導航系統(tǒng);三維激光雷達
性能參數(shù):定位算法:2DSLAM+RTK;
導航算法:全局路徑規(guī)劃+局部路徑規(guī)劃;
應用環(huán)境:室內,校園,園區(qū),變電站等結構化園區(qū)環(huán)境以及野外空曠環(huán)境; 定位精度:室內平均≤5cm;室外平均≤5cm;
▲路徑規(guī)劃方式:自主規(guī)劃,指定路徑;
▲避障方式:遇障停止,遇障繞行;
差分GPS組合導航系統(tǒng):1. 標準單點定位精度: 單頻:H≤3m,V≤5m(1σ,PDOP≤4),雙頻:H≤1.5m,V≤3m(1σ,PDOP≤4;2. 方位角精度:(0.2/R)°,R為基線距離,單位為米;3. 橫滾或俯仰角:(0.4/R)°,R為基線距離,單位為米;4. 動態(tài)差分精度: H:±(10+0.000001×D)mm,V:±(20+0.000001×D)mm;
三維激光雷達:線數(shù):≥16線;測距:≥100米(目標反射率20%);精度:+/-2cm;視角:≥垂直±15°,≥水平360°;角分辨率:水平/方位角0.09°(5Hz)至0.36°(20Hz)。
▲5 、功能:識別和摘取,提供蘋果摘取的視頻展示;
▲6 、實驗課程,投標時提供包含以下內容的文檔資料:
1 機器人傳感器數(shù)據(jù)采集;2機器人移動控制;3手柄控制機器人運動;4機器人相對移動控制;5圖像采集,查看與保存;6機器人地圖構建;7機器人單點導航;8機器人多點導航;9激光雷達數(shù)據(jù)采集與可視化顯示;10手臂關節(jié)控制項目;11手臂末端位置控制項目;12手抓控制;